December 2018 is the last month of the current phase of a European programme to launch radiosondes from ships. Although all details have not yet been agreed by the EUMETNET Assembly, there will be no break or lack of data as of January 2019 as the EUMETNET Automated Shipboard Aerological Programme (E-ASAP) will continue to operate. E-ASAP is a purely operational programme with no or very little R&D. It is part of the global ASAP programme and makes a small but important contribution to the range of data assimilated into numerical weather prediction (NWP) systems, including at ECMWF.
A unique source of data
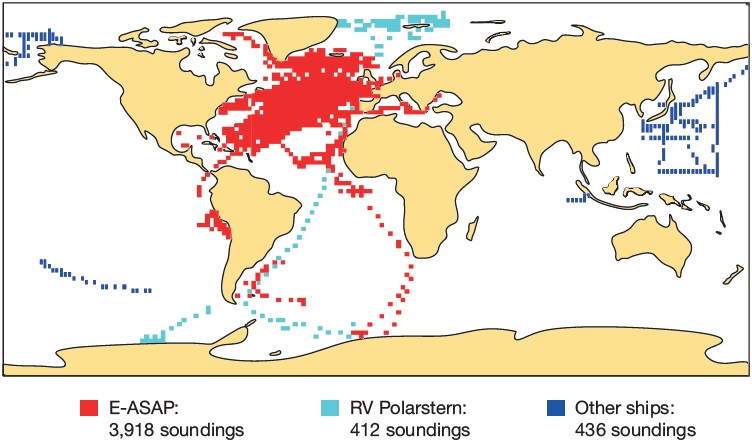
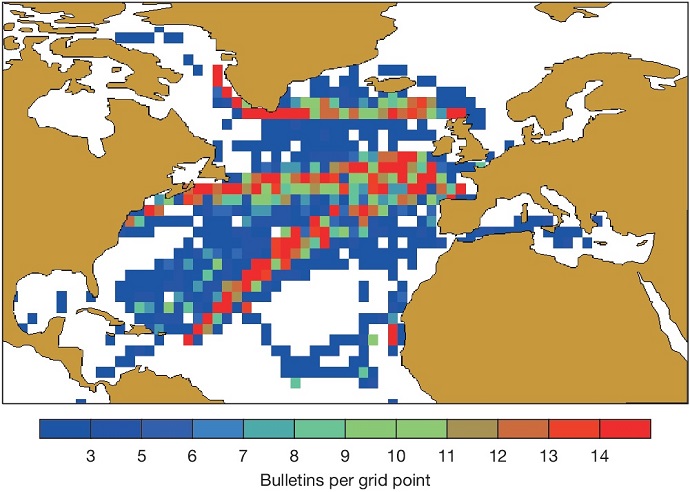
There is good coverage of radiosonde and ascending/descending aircraft (AMDAR) profiles over Europe and North America, but there are very few soundings over the data-sparse North Atlantic. ASAP radiosondes are the only source of upper-air soundings over the oceans. A look at the global distribution of ASAP soundings illustrates the size of the contribution made by the European E-ASAP fleet. Around 85% of all global ASAP soundings are provided by the 18 ships that make up the E-ASAP fleet. The remaining 15% are mainly provided by two Japanese ships and a German research vessel plus some occasional research campaigns. The unique characteristic of the E-ASAP fleet is that it mostly comprises merchant ships in regular service between Europe and North America. Three main sailing routes over the North Atlantic are reflected in the spatial distribution of the received soundings. The leading role of Europe’s contribution to the ASAP programme is recognised by the World Meteorological Organization (WMO).
Manual operation
It is important to clear up a common misunderstanding regarding ASAP operations: ASAP stations are not automatic launchers but have to be operated by the ship’s crew. Lack of experience, the workload of the sailors, sailing speeds of more than 20 knots, adverse weather conditions etc. produce higher failure rates than for land radiosonde stations. However, E-ASAP soundings have proved to be of high quality and have a positive impact.
The main components of an ASAP station are the balloon launcher and the sounding equipment. The launcher may be a semi-automatic container launcher with a pneumatic hatch or a solely manual deck launcher. Successful soundings depend on the experience of the operators on board. Another difference to land stations is the data transmission from the station to the Global Telecommunication System node. All messages have to be transmitted via satellite communication. The limited satellite communication quality requires small data files of less than 15 kilobytes to overcome communication problems due to low signal strength or interference with other radiation sources on board the ships.

To produce small data files, messages sent in the BUFR data format from the ASAP ships only contain information on measurements made at 10 or 20 second intervals plus at standard and significant levels. The BUFR messages are sent out after termination of the sounding. Prior to this, a small message containing only standard and significant levels is transmitted at 100 hPa. This ensures the transmission of basic profile data in case the transmission of the higher-resolution BUFR message fails.
Quality checks
ECMWF routinely performs an NWP-based quality check of E-ASAP soundings. The data assimilation system provides the analysis and background fields of temperature, humidity, wind and geopotential that are used as independent estimates against which observations are compared. These daily monitoring activities are important to check if the quality of the assimilated observations from the different vessels has deteriorated or if the quality of any blacklisted ones (observations from ships not used because their quality is systematically poor) has improved. Currently, most of the observations from E-ASAP reports are used in the ECMWF data assimilation system. In addition, ECMWF produces an annual report on the ASAP quality control monitoring to the Joint WMO-IOC Technical Commission for Oceanography and Marine Meteorology (JCOMM) Ship Observation Team (SOT). Overall, the quality of E-ASAP observations has improved considerably over the last few years to reach quality standards that are fully comparable to land-based radiosondes. The occurrence of reports giving wrong locations – an intermittent problem in the past – is almost non-existent now.
Outlook
E-ASAP started as a three-year pilot project in 1999 before it became a EUMETNET core programme in 2003. Like all EUMETNET programmes, E-ASAP is agreed for periods of five to six years. The current programme phase will end on 31 December 2018. The next phase, 2019 to 2023, has already been agreed by the EUMETNET Assembly. The German national meteorological service (DWD) will continue to manage E-ASAP in the next phase. In addition to technical challenges, such as improving satellite communications, there are also managerial challenges, such as implementing the requirements of the WMO Integrated Global Observing System (WIGOS). Crucially, the future of E-ASAP also depends on the spirit and motivation of the people on board since autolaunchers are not well suited to the harsh conditions on board seagoing ships.
Rudolf Krockauer is the E-ASAP Programme Manager.